
Description
We will Provide Obstacle Avoider full Project with project report apart from that you will unlock free 1 hour assistance from our best engineer for project Understandings.
Mail :- himanshu@cloudeducation.co.in
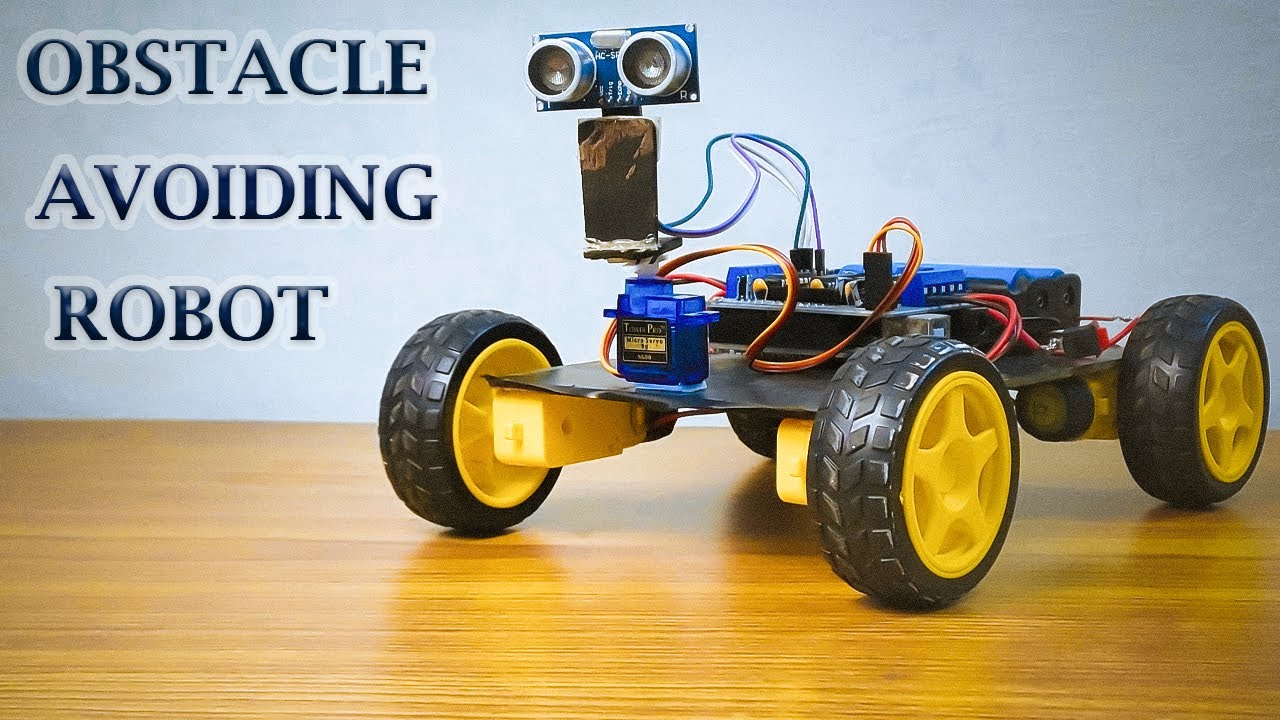
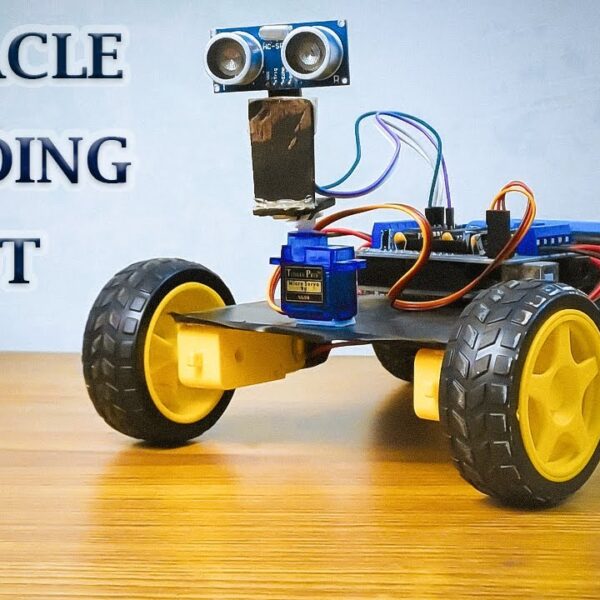
The car drives itself forward until an object comes within the range of the sensor. The car then monitors the object until it is within the minimum distance and then stops moving. The servo is then used to turn the ultrasonic sensor left and the right, taking distance measurements in each direction. The car then decides which direction to turn based on which side has more distance available to move, then turns and continues on until the next object is detected. If both sides are blocked, the car will turn around and drive back out the way it came.







Reviews
There are no reviews yet.